|
I am a first-year M.S./Ph.D. student in AI at KAIST, where I am advised by Prof. Jaegul Choo at Data and Visual Analytics Lab (DAVIAN). I received my B.S. in Biomedical Engineering from Korea University in Feb 2025. Currently, my research focuses on humanoid control, exploring how deep reinforcement learning can enable more robust and adaptive robotic behaviors. My long-term research vision is to bridge advanced robotic control with medical applications, particularly developing intelligent control systems for assistive technologies such as exoskeletons and bionic limbs for individuals with disabilities. |

|
|
* denotes equal contribution. |
|
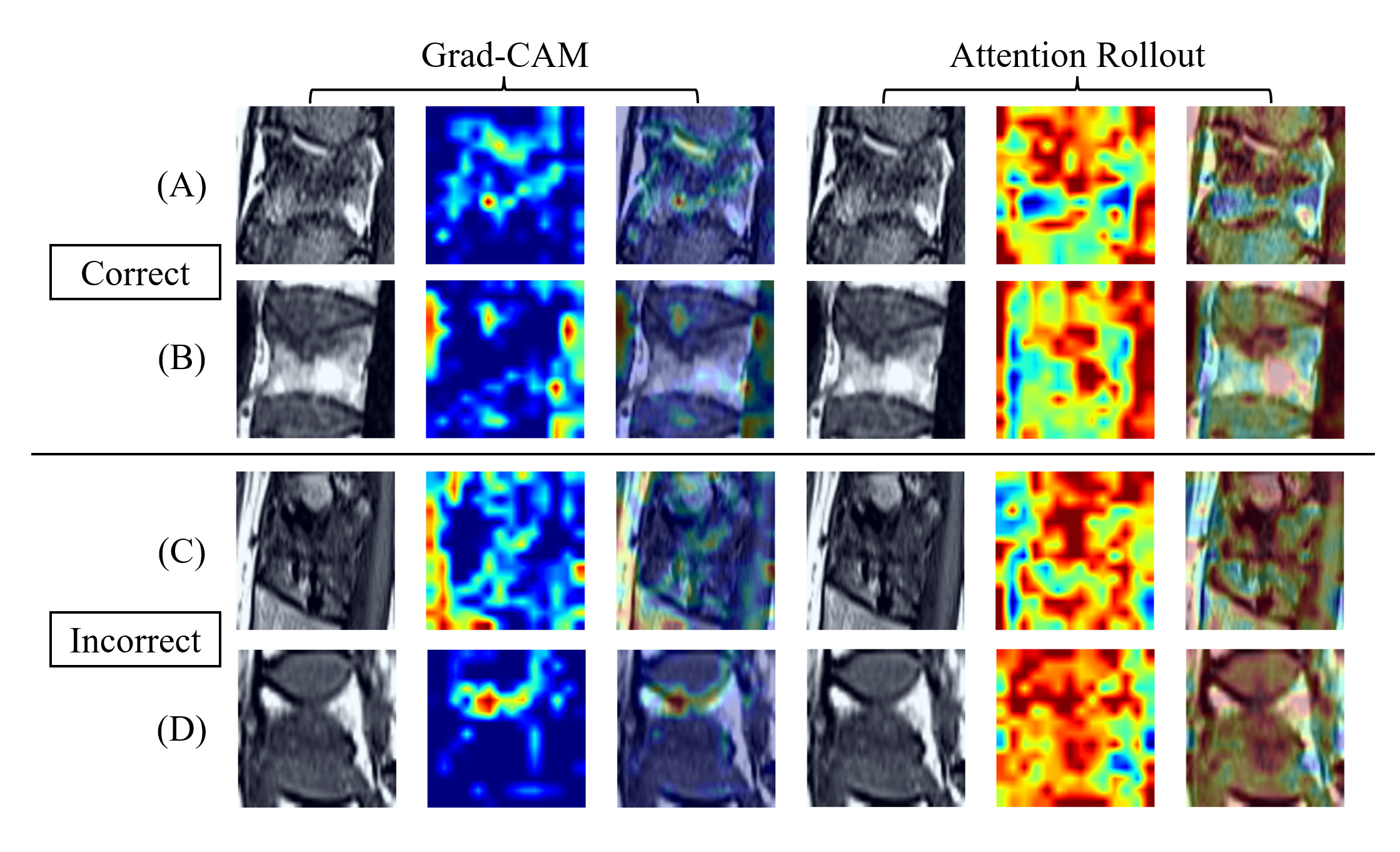
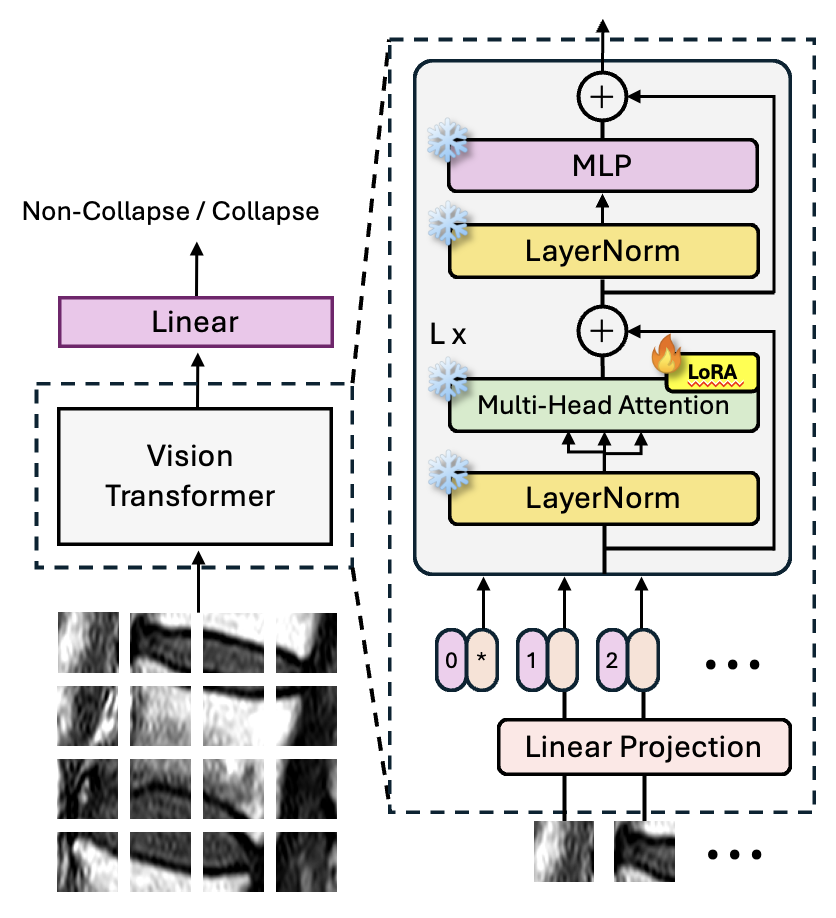
Augmented prediction of vertebral collapse after osteoporotic vertebral compression fractures through parameter-efficient fine-tuning of biomedical foundation models
S. Kim*, I. Kim*, W.T. Yuh*, S. Han, C. Kim, Y.S. Ko, W. Cho, S.B. Park Scientific Reports 14, 31820 (2024) |
|
|
|
OVF Collapse Prediction: Model Architecture and Hyperparameters
5th Conference on Digital Convergence Research, Korean Neurosurgical Society Jun 15, 2024 |
|
|
|
Medical Robot
Sibeen Kim Forward Kinematics | Inverse Kinematics | Velocity Kinematics |
|
|